
Dr Sina Sareh
- Academic Leader
-
Robotics
- Reader in Robotics and Design Intelligence
Sina is an experienced roboticist whose research develops new robotic solutions to human safety and access problems in industrial operations.
Sina leads robotics research at the Royal College of Art. He holds a PhD in Robotics from the University of Bristol where he worked on monolithic design of flexible actuators for operation in confined liquid environments, an MSc in Control Systems from the University of Sheffield, and a BSc in Electrical Engineering from Amirkabir University of Technology, Tehran.
Dr Sareh's latest projects include " Multi-vendor Interoperability in Robotics and Autonomous Systems Proving Grounds"; exploring how a diverse portfolio of robots can work together seamlessly within a proving ground ecosystem, funded by EPSRC via UK-RAS Network, and "Intelligent Medicine Warehousing" funded by InnoHK.
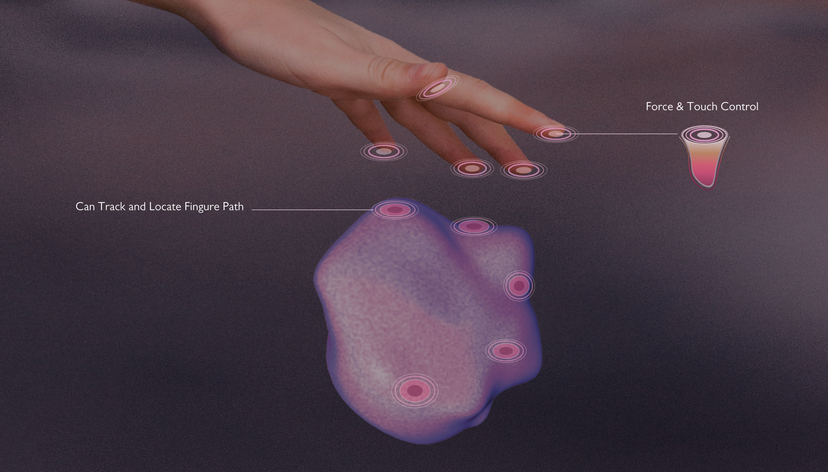
Since joining the RCA in 2017, Dr Sareh have been the principal investigator on a number of successfully completed externally-funded research projects including his EPSRC Fellowship on "Getting a Grip"; advanced anchoring modules for robot mobility & manipulation in unstructured environments, "Haptic Illusion"; a programmable medical training interface which dynamically mimics the feeling of touching human internal organs, "Topographies of Pain"; a soft robotic technology that assists people to articulate their symptoms when they are in pain"; "Reminisys"; a wearable technology that can help people with dementia manage and minimise the disease's impact in their daily lives by reminding them of people/objects and places. Dr Sareh was a co-investigator (RCA PI) on MIMRee; Multi-platform Inspection, Maintenance and Repair in Extreme Environment funded by Innovate UK under the Robotics for a Safer World programme.
Prior to his appointment at the College, Dr Sareh contributed to several high-profile research projects including the EPSRC-funded project Aerial ABM (Aerial Additive Building Manufacturing) at Imperial College London, the EU FP7 STIFF-FLOP (STIFFness Controllable Flexible & Learnable Manipulator for Surgical Operations) at King’s College London, and AAOSN (Adaptive Autonomous Ocean Sampling Networks) at the University of Exeter.
Dr Sareh served as an impact assessor of Sub-panel 12: Engineering in the assessment phase of the Research Excellence Framework (REF) 2021. He is a member of the editorial board at IET Cyber-physical Systems and Robotics Journal, and a member of the EPSRC Peer Review College.
For more information, visit the RCA Robotics Laboratory webpage.
Key details
School, Centre or Area
Research projects






More information
Research interests
Dr Sareh's research areas include:
- Soft robotics,
- Multi-modal mobility, manipulation and attachment,
- Multimodal sensing
Publications, exhibitions, other outcomes
Publications
Peer-reviewed Journal Papers
Selected articles
- Sareh, S., Althoefer, K., Li, M., Noh, Y., Tramacere, F., Sareh, P., Mazzolai, B., Kovac, M. (2017) Anchoring like octopus: biologically inspired soft artificial sucker, Journal of the Royal Society Interface, 14:135.
- Sareh, S., Rossiter, J.M., Conn, A.T., Drescher, K., Goldstein, R.E. (2012) 'Swimming like algae: biomimetic soft artificial cilia', Journal of the Royal Society Interface 20120666.
- Sareh, S., Rossiter, J.M., (2013) 'Kirigami artificial muscles with complex biologically inspired morphologies', Smart Mater. Struct. 22 014004.
- Sareh, S., Noh, Y., Li, M., Ranzani, T., Liu, H., Althoefer, K. (2015) 'Macro-bend optical sensing for pose measurement in soft robot arms', Smart Mater. Struct. 24 125024.
- Li, M., Ranzani,T., Sareh, S., Seneviratne, L.D, Dasgupta, P., Wurdemann, H., Althoefer, K. (2014) 'Multi-Fingered Haptic Palpation utilizing Granular Jamming Stiffness Feedback Actuators', Smart Mater. Struct. 23 095007.
Latest articles
- Li, M., Sareh, S., Xu, G., Ridzuan, M.B., Luo, S., Xie, J., et al. (2016) 'Evaluation of Pseudo-Haptic Interactions with Soft Objects in Virtual Environments'. PLoS ONE 11(6): e0157681.
- Sklar, E., Sareh, S., Secco, E., Faragasso, A., Althoefer, K. (2016) 'A Non-linear Model for Predicting Tip Position of a Pliable Robot Arm Segment Using Bending Sensor Data', Sensors & Transducers, Vol. 199, Issue 4, 52–61.
- Noh, Y., Liu, H., Sareh, S., Chathuranga, D., Wurdemann, H., Rhode, K., Althoefer, K. (2016) 'Image-based Optical Miniaturized Three-Axis Force Sensor for Cardiac Catheterization', IEEE Sensors, Volume:PP Issue:99.
- Noh, Y., Sareh, S., Wudermann, H., Liu, H., Althoefer, K., (2015) 'Three Axial Fiber-Optic Body Force Sensor for Flexible Manipulators', Sensors-11652–2015.
- Li, M., Ridzuan, M., Sareh, S., Seneviratne, L.D., Dasgupta, P., Althoefer K. (2014) 'Pseudo-haptics for rigid tool/soft surface interaction feedback in virtual environments', Journal of Mechatronics, Volume 24, Issue 8, 1092–1100.
- Noh, Y., Bimbo, J., Sareh, S. Wurdemann, H Fraś, J., Chathuranga, J. Liu, H., Housden J., Althoefer, K., Rhode, K. (2016) 'Multi-axis force/torque sensor based on simply-supported beam and optoelectronics', Sensors 2016, 16(11), 1936.
Book Chapter
- Sareh, S., Siddall, R., Alhinai, T., and Kovac, M. (2016) 'Bio-inspred soft aerial robots: adaptive morphology for high performance flight'. In "Soft Robotics: Trends, Applications and Challenges", Volume 17 of the series Biosystems & Biorobotics , Springer, 65–74
Refereed Conference Papers and Workshops
- Sareh, S. and Noh, Y (2018) Low profile stretch sensor for soft wearable robotics, IEEE International Conference on Soft Robotics (RoboSoft 2018), Livorno, Italy.
- Sareh, S., Noh, Y., Ranzani, T., Liu, H., Althoefer, K., (2015) 'A 7.5mm Steiner chain fiber-optic system for multi-segment flex sensing', IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2336–2341.
- Sareh, S., Noh, Y., Ranzani, T., Wudermann, H., Liu, H., Althoefer, K. (2015) 'Modular fiber-optic shape sensor for articulated surgical instruments'', Hamyln Symposium on Medical Robotics.
- Wurdemann, H., Sareh, S., Shafti, A., Noh, Y., Faragasso, F., Liu, H., Hirai, S., Althoefer, A. (2015) 'Embedded electro-conductive yarn for shape sensing of soft robotic manipulators', Engineering in Medicine and Biology Conference (EMBC).
- Noh, Y., Sareh, S., Wudermann, H., Liu, H., Althoefer, K. (2015) 'Image Based Optical Multi-Axis Force Sensor for Medical Robotics', Hamyln Symposium on Medical Robotics.
- Sareh, S., Jiang, A., Faragasso, A., Noh, Y., Nanayakkara, T., Dasgupta, P., Seneviratne, L., Wurdemann, H., Althoefer, K., (2014) 'Bio-Inspired Tactile Sensor Sleeve for Soft Surgical Manipulators', IEEE International Conference on Robotics and Automation (ICRA) 2014, Hong Kong, China.
- Rossiter, J.M. and Sareh, S. (2014) 'Kirigami design and fabrication for biomimetic robotics', SPIE Smart Structures and Materials+ Nondestructive Evaluation and Health Monitoring, San Diego, California, USA.
- Li, M., Sareh, S., Ridzuan, M., Senviratne, L., Dasgupta, P., Wudermann, H., Althoefer, K. (2014) 'Multi-Fingered Palpation using Pseudo-Haptic Feedback', Hamyln Symposium on Medical Robotics.
- Noh, Y., Sareh, S., Back, J., Wurdemann, H., Ranzani, T., Secco, E.L., Faragasso, A., Liu, H., Althoefer, K. (2014) 'Development of a Three Axial Body Force Sensor for Flexible Manipulators', IEEE International Conference on Robotics and Automation (ICRA) 2014, Hong Kong, China.
- Faragasso, A. , Bimbo, J. , Noh, Y., Wurdemann, H.A., Sareh, S., Liu, H. , Nanayakkara, T., Althoefer, K. (2014) 'Novel Uniaxial Force Sensor based on Visual Information for Minimally Invasive Surgery', IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China.
- Noh, Y., Secco, E.L., Sareh, S., Wurdemann, H.A., Faragasso, A., Back, J., Liu, H., Sklar, E., Althoefer, K. (2014) 'A Continuum Body Force Sensor Designed for Flexible Surgical Robotic Devices', International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC).
- Gibbons, R., Sareh, S., Poulton, A. and Andrews, B. J. (2011) 'Manual control of 4ch FES rowing'. In: 16th IFESS Annual Conference, 2011: Electrical Stimulation and the Anthropological "Post-Human" Body, 8-11 September 2011, Sao Paulo, Brazil.
- Sareh, S., Conn, A.T., Rossiter, J.M.,(2010), 'Optimization of bio-inspired multi-segment IPMC cilia', Proceedings of Electroactive Polymer Actuators and Devices (EAPAD XII) Conference, San Diego, California, USA, Proc. SPIE Vol. 7642.
- Sareh, S., Andrews, B. J., Gharooni, S and Tokhi, M. O. (2008) 'Compliant control of FES-rowing with energy store and release mechanism'. Proceedings of CLAWAR-2008: 11th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Coimbra, Portugal, pp. 282-288, World Scientific Publishing, ISBN: 13-978-981-283-576-5, 10-981-283-576-8.
- Sareh, S., Andrews, Brian J; Green, Matthew and Poulton, Adrian S (2008) 'Control strategies adopted by elite FES rowers'. In: 13th Annual Conference of the International Functional Electrical Stimulation Society, 21-25 Sep 2008, Freiburg, Germany.
- Gharooni, S., Sareh, S. and Tokhi, M.O. (2007) 'Development of FES-rowing Machine with Quadriceps Stimulation and Energy Storing Device', 12th Annual Conference of the International FES Society, Philadelphia, USA.

